Page Not Found
Page not found. Your pixels are in another canvas.
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
Published:
Something interesting in the formulation of Planck’s law is that its mathematical form was obtained before considering the quantisation hypothesis. In many sources, it is said that this is Planck’s fortunate or lucky guess. At that time, classical efforts gave two approximations for the black body radiation law, one in the high-frequency regime (Wien) and one in the low frequency regime (Rayleigh-Jeans).
Published:
Let’s start the journey with one of best examples of why quantum mechanics is necessary, i.e, a noticiable break of the predictions of classical physics regarding microscopic (nanoscopic?) phenomena.
Published:
I have to admit I’m a book hoarder. In between of the collection, a few books on quantum mechanics that I mostly got from charity ships are now reaching the surface in my room. Although not superstitious, I think it is a sign that it would be nice to devote time during the week to specifically learn (or relearn?) quantum mechanics.
Published:
This will be a space to share more about automation in biology. I want also to share random interests and thoughts that could be useful in the future.
Watch the robot in action! Opentrons is a platform with a huge flexibility, but nevertheless some operations such as tube moving, opening the lids of the ChiBio reactors, among others, require an extra arm. For this purpose, I built this robotic arm, which is big enough to reach the deck area and small enough to fit into the Opentrons OT-2. The design is entirely from Kelton Serra (Youtube channel: Build some Stuff), who kindly share the 3D models. You can watch the original video here and the tutorials 1 and 2. Please suscribe if you can. Going into details, it uses a microservo for the gripper, a 20kg servo for the shoulder joint (the one that’s supporting the arm weight in the picture), and RC servos for the other joints (wrist, elbow and base). Everything is connected to an Arduino-compatible servo controller, powered by a adjustable power adapter. An Arduino Uno is used to link the controller with the input potentiometers, and a small Arduino script helps to align the potentiometers’ angle readings with the servos’ shaft angles. 
Opentrons and ChiBio combined are strong for automatising protocols involving starter cultures. This primary configuration uses 4 minireactors inside the deck, to give enough space for tubes, plates and tips inside. Currently the reactors are being used as starters cultures (LB medium) that will be transfer to the plate, where each well has different culture medium composition. The results are later fed to recommend new combinations and generate the scripts to control the Opentrons robot and Chibio on the next iteration. Everything automatised with Python, including alerts for system crashes, and happening inside the UV-lamp desinfected deck. 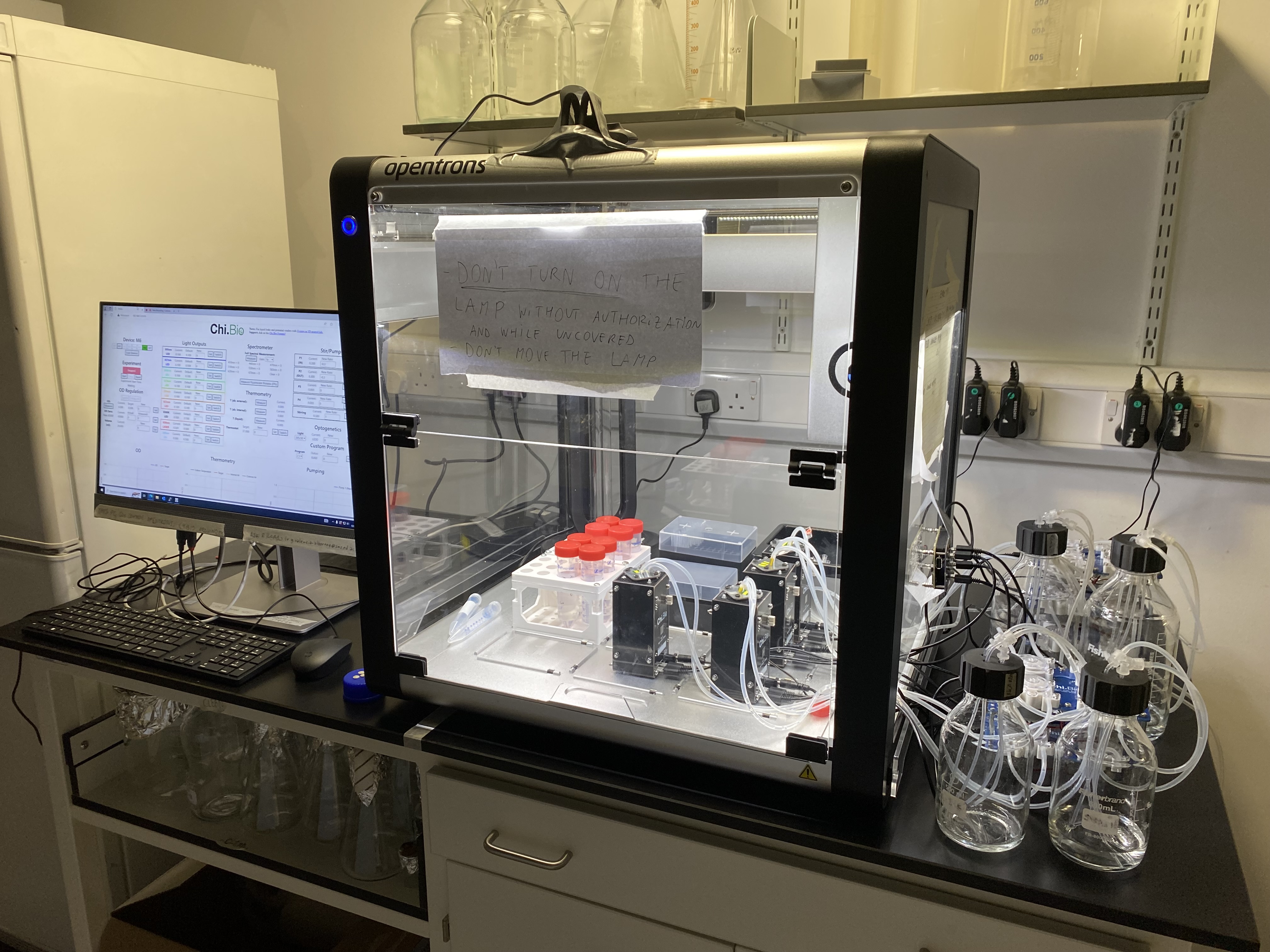
A new year and that means general maintenance of the ChiBio system. 70% ethanol was flushed across the system with 4 minireactors. The pumps are opposing themselves, so the reservoir levels are kept approximately unchanged over the cleaning process. New stirring pills (cross shape) were also tested. 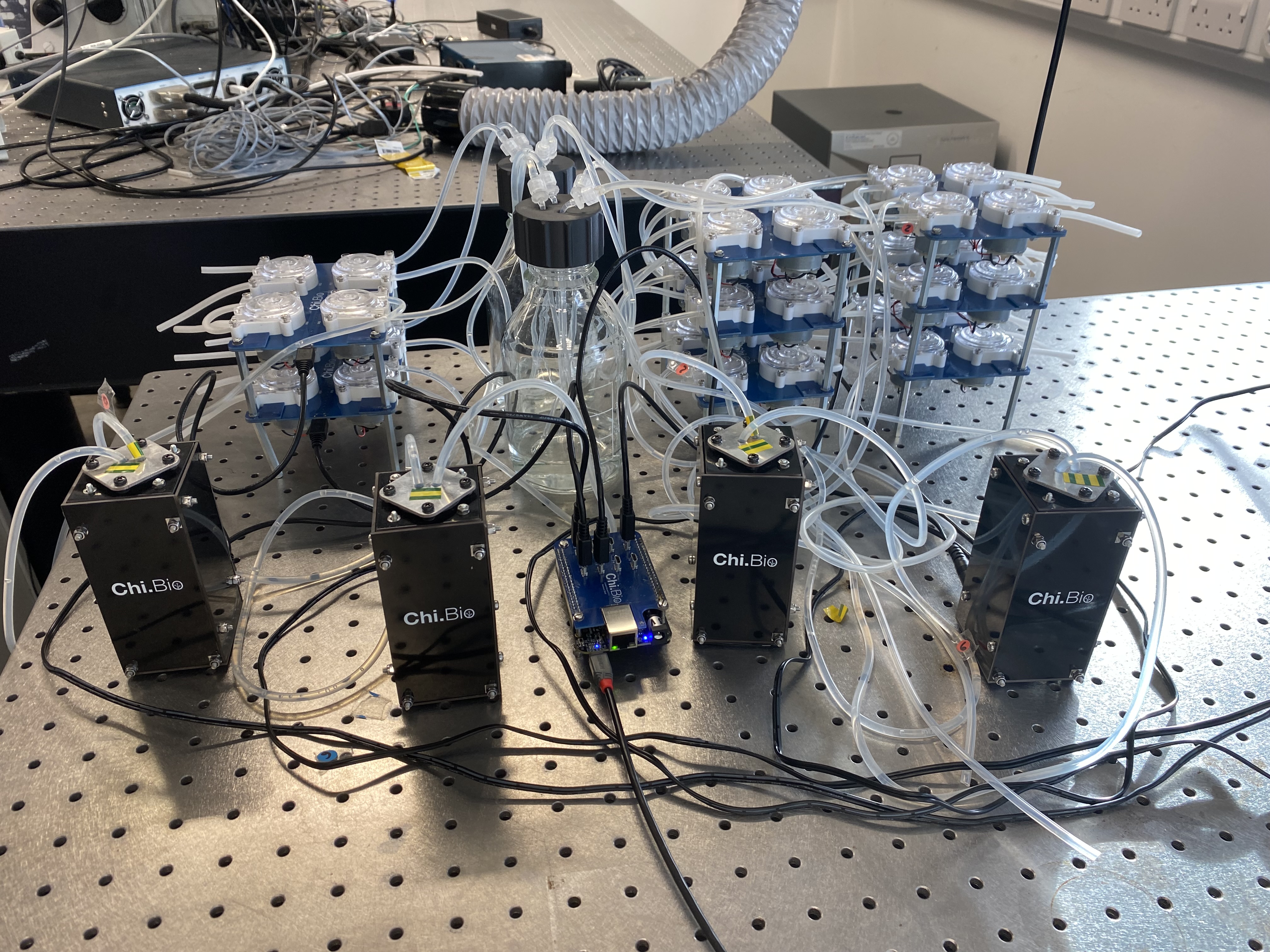
Building Inkwell was an amazing experience. It’s a non electrical device to produce consistent biological smears (usually blood, but also works with microbial cultures) . The core mechanism is the spring connected to the syringe plunger. Using the valve, the amount of air flow through the end of the syringe can be controlled. At the right spot, the reduced air output acts a dampener of the spring action, make it approximately linear in speed. The design was conceived by the Manu Prakash lab in Stanford. More information about the assembly, mechanical details and on-field testing can be found in their Twitter and preprint. 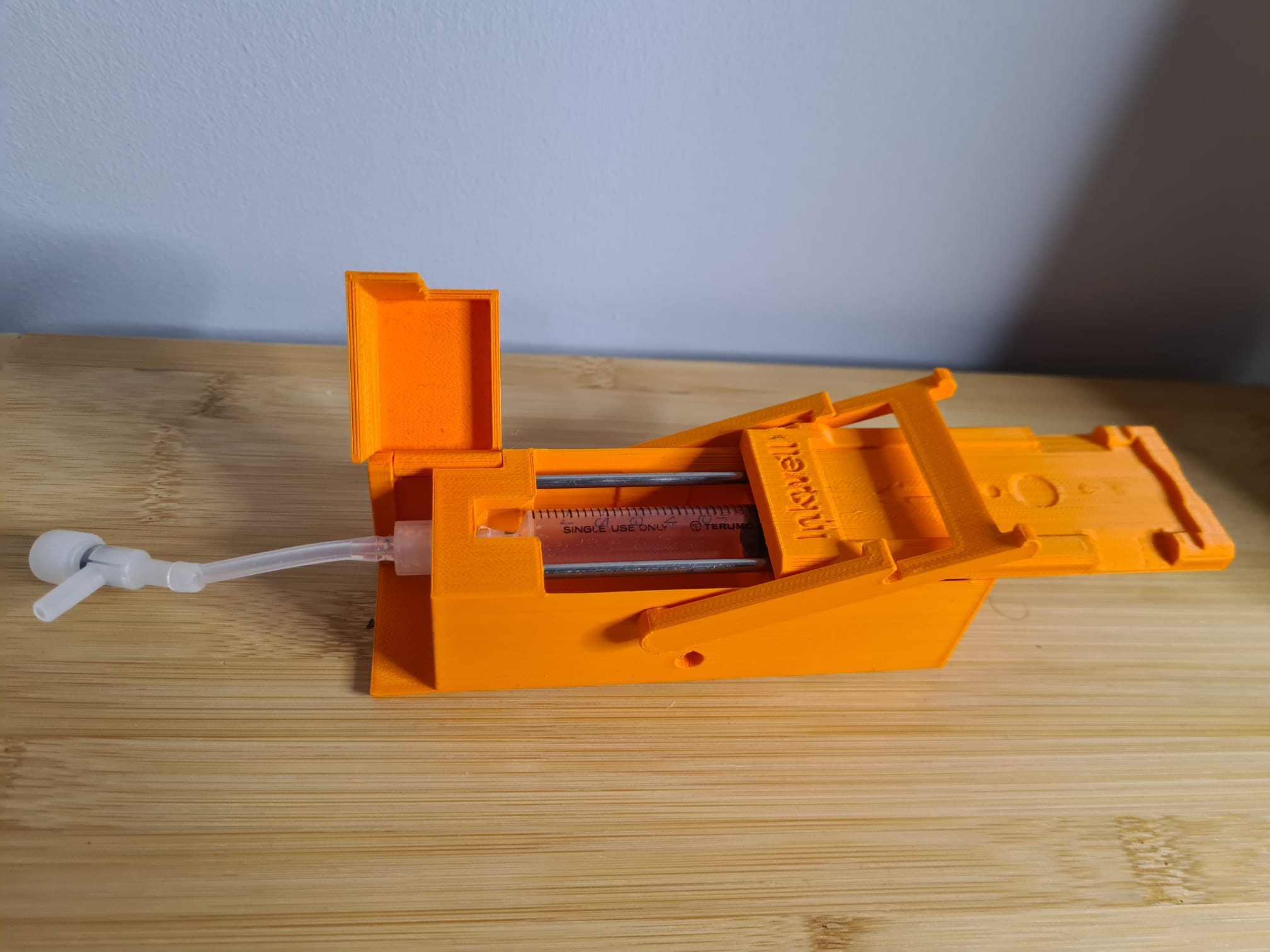
Published in Marine Genomics, 2018
Download here
Published in Frontiers in Microbiology, 2018
Download here
Published in Marine Drugs, 2021
This paper is about the number 1. The number 2 is left for future work.
Download here
Published in Microbial Genomics, 2021
Download here
Published in bioRxiv, 2024
Download here
Published:
For more information, click here
Published:
For more information, click here
Published:
For more information, click here